找不到韌體工作之亡羊補牢專案-Part3
Part 2 終於把環境搭起來了🍵,接下來就是
最無聊最恐怖又有點有趣的練習FreeRTOS
Logger Service 與 FreeRTOS 除錯觀察
系列文章
- Part 1:專案規劃與準備清單
- Part 2:開發環境與 FreeRTOS 架構
- Part 3:Logger Service 與 FreeRTOS 除錯觀察
- Part 4:Input System:GPIO、Polling Debounce 與 Event Queue
- Part 5:Input System:EXTI、ISR Notify 與 Software Timer Debounce
- Part 6:Display System:ILI9341 TFT、SPI 與像素繪圖
前言
系統跑起來之後,下一個最常做的事情就是印 log,
你不印點東西出來,基本上就是在通靈。
雖然說當下寫這篇,就算接邏輯分析儀也像在通靈,看不出個所以然ㄏㄏ
本篇目標
Log service
- 建立非同步
logger_task,統一處理 UART log 輸出 - 使用 FreeRTOS queue 實作 log 的 producer / consumer 模型
- 讓各 task 透過
LOG_INFO()、LOG_WARN()、LOG_ERROR()將 log message 送進log_queue
- 建立非同步
除錯與觀察
- 觀察 task priority 對
logger_task與heartbeat_task的影響 - 使用 stack high water mark 檢查 task stack 使用量
- Debug GPIO / 邏輯分析儀試用
- 觀察 task priority 對
專案下載
本篇文章對應的完整範例專案已整理在 GitHub Release 中,
如果想直接對照程式碼或跳過環境建立流程,可以從以下連結下載
Log Service : producer / consumer
為什麼需要 logger_task
Part 2 已經可以透過 USART3 / ST-LINK Virtual COM Port 印出 log。
如果每個 task 都直接呼叫 printf() 或 HAL_UART_Transmit(),小範例還可以接受,但專案變大後會有幾個問題:
- 多個 task 同時印 log,輸出可能交錯
HAL_UART_Transmit()是 blocking,會卡住呼叫它的 task- driver、service、task 如果都直接操作 UART,之後會很難管理
- log 格式、log level、timestamp 不容易統一
- 後續改 DMA 輸出方式較複雜
所以目前先做一個小型 log service。
為什麼用 producer / consumer 管理 log,而不是 mutex
雖然 STM32F767ZI 是單核心 MCU,但在 FreeRTOS 裡仍然會有 task 切換。
也就是說,同一時間只有一個 task 在跑,不代表共享資源就不需要保護。
如果只是要保護 UART debug console,可以用 mutex 來保護,
概念是,同一時間只允許一個 task 使用 UART,其他 task 必須等待。
osMutexAcquire(uart_mutex, osWaitForever);printf("[INFO][game] state=%lu\r\n", state);osMutexRelease(uart_mutex);但這樣會有個缺點,就是每個 task 都知道 UART 的存在,職責切得不太乾淨,
因此改用 producer / consumer 模型,把「產生 log」和「輸出 log」拆開。
各個 task 只負責產生 log,當 log producer,丟進 log_queue。logger_task,則作為 log consumer,負責輸出 log。
雖然 logger_task 本身也可能被 FreeRTOS scheduler 切走。
但這時候影響的是 log 輸出時間可能延後,而不是 log 內容互相交錯。
等 scheduler 再切回 logger_task 時,它會繼續處理 queue 裡的 log。
簡單來說:
- mutex:保護共享資源,避免多個 task 同時使用 UART
- producer / consumer:讓其他 task 不直接碰 UART,而是交給
logger_task統一處理
Logger 資料流
🌕Init side:🌕 app_main_init() | | log_service_init() | -> osMessageQueueNew(APP_LOG_QUEUE_DEPTH, | sizeof(log_service_message_t), | NULL) v log queue ready------------------------🌗Producer side:🌗 debug_task heartbeat_task 其他未來的 task | | #include "Log/log_service.h" | LOG_INFO(...) | LOG_WARN(...) | LOG_ERROR(...) v log_service_submit() | | osMessageQueuePut(logQueueHandle, ...) v log queue------------------------🌚Consumer side:🌚 logger_task | | log_service_process() | -> osMessageQueueGet(logQueueHandle, ...) | -> format log line | -> board_uart_write_debug() | -> HAL_UART_Transmit() v USART3 / ST-LINK Virtual COM Port資料夾結構
App/├─ Services/│ └─ Log/│ ├─ log_service.c│ └─ log_service.h└─ Tasks/ ├─ Inc/ │ ├─ debug_task.h │ └─ logger_task.h └─ Src/ ├─ debug_task.h └─ logger_task.cLOG 格式定義
[00001234][INFO ][RTOS-debug_task] debug_task alive counter=0[00001240][WARN ][game] state=IDLE action=FEED[00001255][ERROR][lcd] spi_timeout retry=1欄位如下:
timestamp:系統時間,目前使用HAL_GetTick(),單位是 mslevel:log 等級,目前有INFO、WARN、ERRORmodule:log 來源,例如MAIN、RTOS、LCD、GAME…message:實際訊息內容
Logger 參數設定
//是否啟用 log service#define APP_LOG_ENABLE 1//log queue 最多暫存幾筆 log message#define APP_LOG_QUEUE_DEPTH 8//module 名稱最大長度,包含字串結尾 '\0'#define APP_LOG_MODULE_NAME_MAX_LEN 32//message 最大長度,包含字串結尾 '\0'#define APP_LOG_MESSAGE_MAX_LEN 80LOG_INFO / LOG_WARN / LOG_ERROR 巨集
目前在 log_service.h 裡定義:
#define LOG_INFO(module, format, ...) \ log_service_submit(APP_LOG_LEVEL_INFO, module, format, ##__VA_ARGS__)#define LOG_WARN(module, format, ...) \ log_service_submit(APP_LOG_LEVEL_WARN, module, format, ##__VA_ARGS__)#define LOG_ERROR(module, format, ...) \ log_service_submit(APP_LOG_LEVEL_ERROR, module, format, ##__VA_ARGS__)#include "Log/log_service.h"使用方式:LOG_INFO("RTOS-log_service", "debug_task alive counter=%lu", counter++);LOG_WARN("LCD", "spi_timeout retry=%lu", retry);LOG_ERROR("GAME", "invalid_state=%lu", state);除錯與觀察
除了真正實作 Task、Service,
最無聊的事情就是除錯與觀察🍵
Task Priority:先用 log timestamp 觀察
FreeRTOS scheduler 會根據 task priority 和 task 狀態決定目前要執行哪個 task。
我們創立一個 busy_task 製造 CPU 壓力,再透過 log timestamp 觀察不同 priority 的差異。
目前測試的 task:
logger_task : osPriorityNormaldebug_task : osPriorityLowheartbeat_task : osPriorityLowbusy_task 用來做對照測試:
- 測試 A:busy_task : osPriorityNormal
- 測試 B:busy_task : osPriorityLow
busy_task 會故意做一段 busy loop,跑完後印出 log,接著短暫 delay
for (;;){ //此迴圈約花 900ms~1100ms for (volatile uint32_t i = 0U; i < 5000000UL; i++) { } LOG_INFO("busy", "busy loop done counter=%lu", counter++); osDelay(10U);}debug_task 則維持每 1 秒印一次 log:
for (;;){ LOG_INFO("RTOS-debug_task", "debug_task alive counter=%lu", counter++); osDelay(1000U);}測試 A:busy_task 是 normal priority
這時候 busy_task priority 比 debug_task、heartbeat_task 高。
[00000019][INFO ][RTOS-log_service] log_service_init called[00000833][INFO ][busy] busy loop done counter=0[00000838][INFO ][RTOS-debug_task] debug_task alive counter=0[00001653][INFO ][busy] busy loop done counter=1[00002471][INFO ][busy] busy loop done counter=2[00003289][INFO ][busy] busy loop done counter=3[00003294][INFO ][RTOS-debug_task] debug_task alive counter=1[00004108][INFO ][busy] busy loop done counter=4[00004926][INFO ][busy] busy loop done counter=5[00005744][INFO ][busy] busy loop done counter=6[00005749][INFO ][RTOS-debug_task] debug_task alive counter=2且此時的 heartbeat_task 出現延遲 Toggle。
這代表:
- 較高 priority 的 busy_task 長時間佔用 CPU
- 低 priority 的 debug_task 只能等 busy_task 進入 delay 後才有機會跑
測試 B:busy_task 是 low priority
這時候 busy_task 和 debug_task、heartbeat_task priority 一樣。
觀察到的 log 會比較接近,debug_task 大約每 1000 ms 執行一次,busy_task 也持續執行。
且此時的 heartbeat_task 沒有延遲 Toggle,
系統沒有明顯卡住。
[00000019][INFO ][RTOS-log_service] log_service_init called[00000025][INFO ][RTOS-debug_task] debug_task alive counter=0[00000845][INFO ][busy] busy loop done counter=0[00001032][INFO ][RTOS-debug_task] debug_task alive counter=1[00001680][INFO ][busy] busy loop done counter=1[00002038][INFO ][RTOS-debug_task] debug_task alive counter=2[00002514][INFO ][busy] busy loop done counter=2[00003044][INFO ][RTOS-debug_task] debug_task alive counter=3[00003348][INFO ][busy] busy loop done counter=3[00004050][INFO ][RTOS-debug_task] debug_task alive counter=4小結
priority 較高的 task 會優先被排程
如果高 priority task 長時間不 block / delay
低 priority task 會被延後,甚至可能餓死
如果 task 有適當呼叫 osDelay()
其他 task 才有機會執行
Stack High Water Mark:觀察 task stack 使用量
每個 FreeRTOS task 都有自己的 stack。
如果 stack 設太小,程式可能會出現很難追的錯誤;
如果 stack 設太大,又會浪費 RAM。
FreeRTOS 提供 high water mark,可以用來觀察某個 task 還剩下多少 stack 空間。
在 CMSIS-RTOS v2 裡,可以使用:
uint32_t stack_space = osThreadGetStackSpace(osThreadGetId());但這樣每個 task 都要自己加一段 log,之後會變得很散,
所以這邊加入一個 monitor_task,定期觀察各個 task 還剩下多少 stack 空間,
這樣所有 task 的 stack 狀態都可以集中觀察。
monitor_task | | app_tasks_get_logger_handle() | app_tasks_get_debug_handle() | app_tasks_get_heartbeat_handle() | app_tasks_get_busy_handle() | app_tasks_get_monitor_handle() vosThreadGetStackSpace(thread_id) | vLOG_INFO("monitor", "%s stack_space=%lu", ...)開啟 monitor_task 後,UART terminal 會定期看到類似:
[00015110][INFO ][RTOS-monitor_task] logger stack_space=250[00015116][INFO ][RTOS-monitor_task] debug stack_space=314[00015122][INFO ][RTOS-monitor_task] heartbeat stack_space=222[00015128][INFO ][RTOS-monitor_task] monitor stack_space=310這些數值代表「該 task 曾經剩下的最小 stack 空間」,
數值越小,代表 stack 越接近用完。
之後如果 task 裡面有:
- 較大的 local buffer
printf()/snprintf()- 字串格式化
- driver 暫存資料
- 較深的 function call
就要特別注意 stack 使用量。
Debug GPIO / 邏輯分析儀試用
除了透過 UART log 觀察程式狀態之外,我們也可以使用 GPIO 當作 debug marker(除錯標記)。
做法是在想量測的程式片段前後切換 GPIO:
HAL_GPIO_WritePin(DEBUG_GPIO_Port, DEBUG_Pin, GPIO_PIN_SET);/* code section to measure */HAL_GPIO_WritePin(DEBUG_GPIO_Port, DEBUG_Pin, GPIO_PIN_RESET);當程式執行到 HAL_GPIO_WritePin(..., GPIO_PIN_SET) 時,debug pin 會被拉高。
當程式執行到 HAL_GPIO_WritePin(..., GPIO_PIN_RESET) 時,debug pin 會被拉低。
如此一來,只要用邏輯分析儀觀察高電位寬度,就能知道這段程式大約執行了多久。
選擇一個可用的 GPIO
但!!!
目前 CubeMX 已經定義好的 GPIO 幾乎都有既定用途,不能隨便拿來當 debug pin。
以 PB0、PB7、PB14 來說,已經被用來控制板子上的 LED,也就是我們前面做的 heartbeat_task LED
如果直接拿這些 pin 來當 debug marker,可能會影響原本板子上的功能,也會讓觀察結果變得混亂。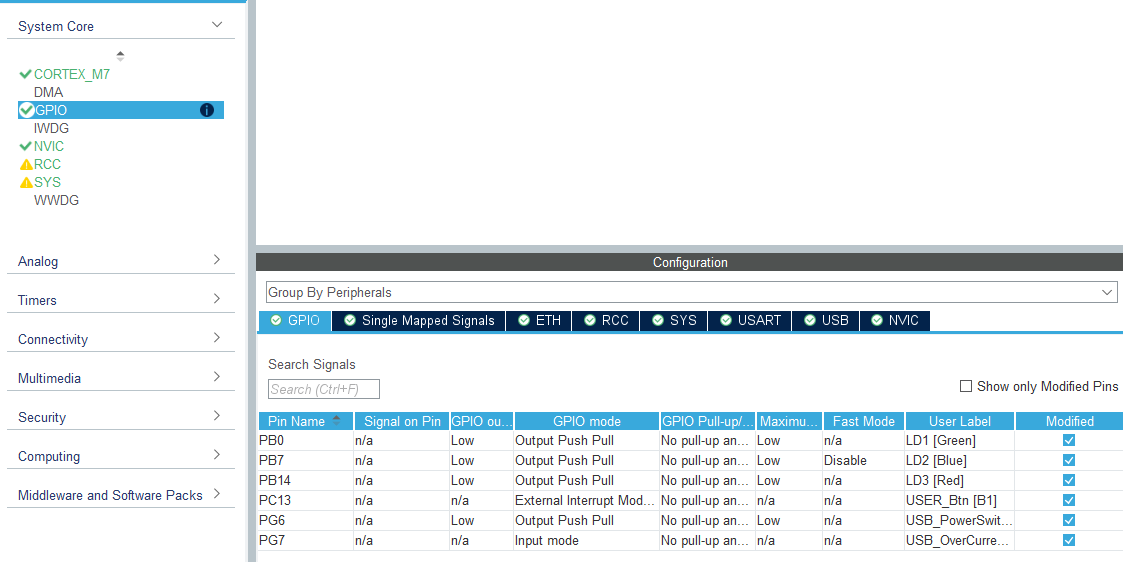
因此我們需要先打開 gb_f767zi.ioc,重新找一個目前沒有被使用的 pin。
這裡以 PF12 ( GPIO Port F 的第 12 號腳位 ) 為例,將它設定成 GPIO_Output。
在 STM32 中,GPIO 腳位會依照不同的 Port 分組
- 例如
GPIOA、GPIOB、GPIOC到GPIOF等
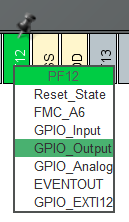
之所以要設定成 GPIO_Output,是因為我們要做的是:
- 讓 MCU 透過程式主動把某個 pin 拉高或拉低。
- 這個 pin 不是 MCU 拿來讀取外部訊號,而是由 MCU 自己輸出 High / Low 給邏輯分析儀觀察。
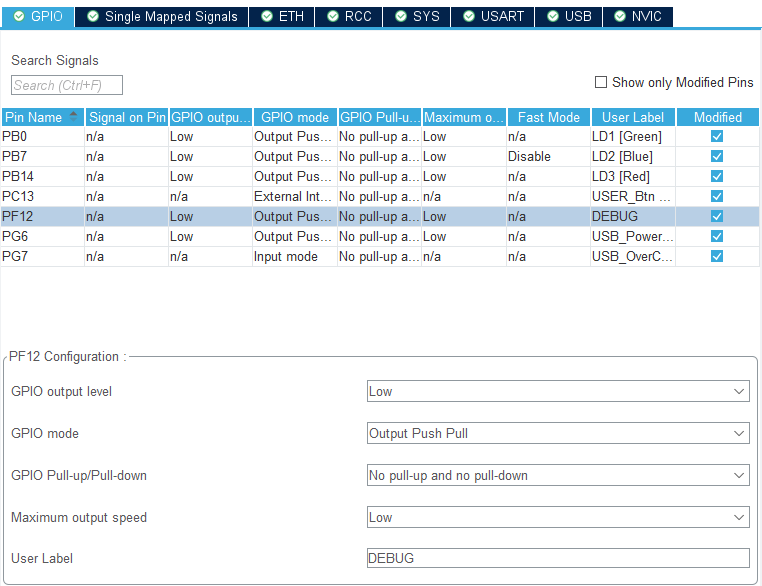
GPIO 詳細設定
這裡主要會設定幾個項目:
- GPIO output level
- GPIO mode
- Pull-up / Pull-down
- Maximum output speed
- User Label
GPIO output level
這個選項決定 GPIO 初始化完成後,預設要輸出高電位還是低電位。
這裡設定為:GPIO output level = Low
也就是開機初始化時,先讓 debug pin 輸出低電位。
這樣可以避免 debug pin 一開機就維持高電位,讓後續用邏輯分析儀觀察時比較清楚。
常見選項:
Low- 初始化後輸出低電位
- 適合 debug marker、LED 預設關閉、控制腳位預設不啟動的情境
High- 初始化後輸出高電位
- 適合外部電路需要 MCU 一開機就拉高控制腳的情境
以 debug GPIO 來說,通常會選 Low。
因為我們希望只有被量測的程式區段執行時,pin 才會被拉高。
GPIO mode
這個選項決定 GPIO 的輸出型態。
這裡設定為:GPIO mode = Output Push Pull
Output Push Pull 是一般 GPIO 輸出高低電位時最常用的模式。
- 輸出 High 時,MCU 主動把 pin 拉到高電位
- 輸出 Low 時,MCU 主動把 pin 拉到低電位
也就是說,High 和 Low 都是由 MCU 主動驅動。
這很適合拿來做 debug marker,因為邏輯分析儀可以很清楚地看到電位切換。
常見選項:
Output Push Pull- 一般 GPIO 輸出模式
- 適合 LED 控制、debug pin、chip select、reset pin 等需要明確輸出高低電位的情境
Output Open Drain(開漏輸出)- 只能主動拉低,不能主動輸出高電位
- 如果要看到高電位,通常需要外部或內部 pull-up
- 常見於 I2C、共享訊號線,或多個裝置可能一起控制同一條線的情況
以 debug GPIO 來說,通常不需要 Open Drain(開漏輸出)。
因為我們只是要讓 MCU 自己輸出清楚的 High / Low,所以選 Output Push Pull 比較直覺。
Pull-up / Pull-down
這個選項決定是否啟用 MCU 內部的上拉或下拉電阻。
這裡設定為:Pull-up/Pull-down = No pull-up and no pull-down
因為這個 pin 是由 MCU 主動輸出電位,不是浮接輸入,所以不需要額外開啟內部上拉或下拉。
常見選項:
No pull-up and no pull-down- 不啟用內部上拉或下拉
- 適合 GPIO output,或外部電路已經有明確電位的情況
Pull-up- 啟用內部上拉
- 當 pin 沒有被外部訊號主動拉高或拉低時,會預設偏向高電位
- 常用在按鍵輸入、開漏輸出訊號,或需要避免輸入腳浮接的情況
Pull-down- 啟用內部下拉
- 當 pin 沒有被外部訊號主動拉高或拉低時,會預設偏向低電位
- 常用在按鍵輸入,或希望訊號預設為 Low 的情況
以 debug GPIO 來說,因為 MCU 已經會主動輸出 High / Low,所以選 No pull-up and no pull-down 就可以了。
Maximum output speed
這個選項決定 GPIO 輸出切換時的速度能力。
這裡設定為:Maximum output speed = Low
目前只是用來量測 task 裡某段程式的執行時間,GPIO 切換頻率不高,所以 Low 就足夠。
常見選項:
Low- 切換速度較慢
- 雜訊較少,功耗也較低
- 適合 LED、一般控制腳、debug marker 等不需要高速切換的用途
Medium- 速度比 Low 高一些
- 適合稍微頻繁切換的 GPIO 訊號
High- 適合比較高速的 GPIO 訊號
- 例如較快的控制訊號,或需要較短上升 / 下降時間的情境
Very High- 速度最高
- 通常用在高速訊號,或對時序要求比較嚴格的情境
不過速度越高不代表一定越好。
GPIO 切換越快,訊號邊緣越陡,也比較容易帶來 EMI 或雜訊問題。
所以一般 debug marker 如果只是量測 task 區段、driver 執行時間,通常先用 Low 就好。
如果之後要量測非常短的時間,或是邏輯分析儀看到的邊緣不夠清楚,再考慮改成 High 或 Very High。
User Label
這個選項可以幫 GPIO 取一個比較好讀的名稱。
這裡設定為:User Label = DEBUG
設定 User Label 之後,CubeMX 產生程式碼時,就會自動產生對應的 pin 名稱。
之後程式就可以使用:
DEBUG_PinDEBUG_GPIO_Port
來操作這個 GPIO。
這樣比直接在程式裡寫 GPIO_PIN_12 或 GPIOF 更清楚。
因為看到 DEBUG_Pin 時,就能直接知道這支 pin 是拿來做 debug marker 用的。
產生程式碼
設定完成後按下 Generate Code。
產生程式碼之後,可以打開 Core/Inc/main.h 確認,應該會看到:
#define DEBUG_Pin GPIO_PIN_12#define DEBUG_GPIO_Port GPIOF這代表 CubeMX 已經幫我們把 PF12 對應到 DEBUG_Pin 和 DEBUG_GPIO_Port。
之後只要在程式中操作這兩個 define,就可以控制 PF12 的高低電位。
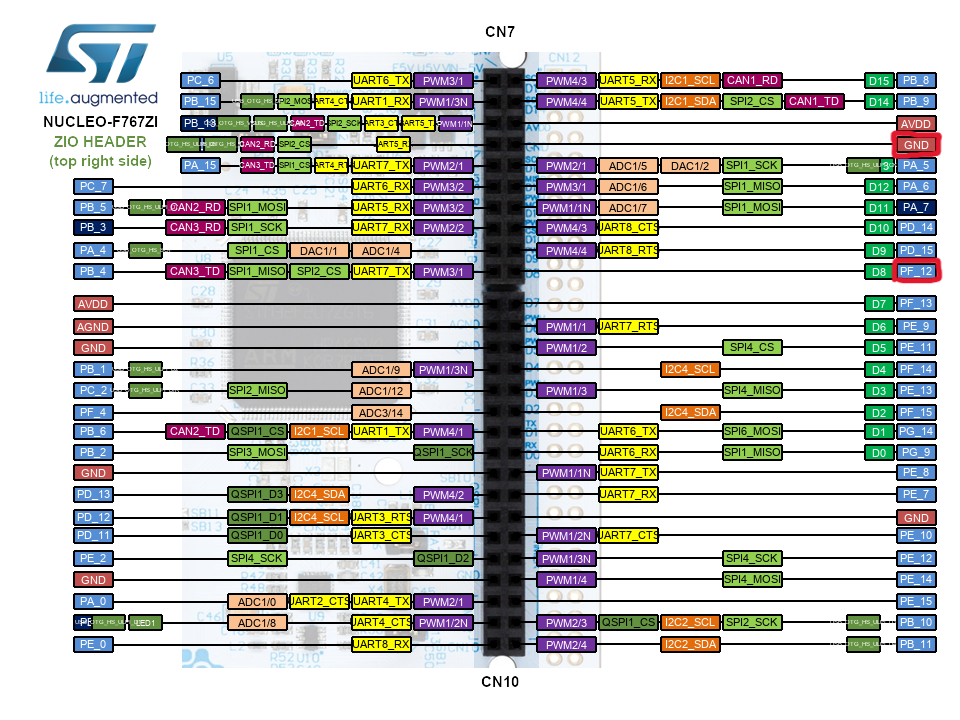
確認實際接腳位置
接著可以從 NUCLEO-F767ZI 的接腳圖確認 PF12 的實際位置。
找到 PF12 之後,將邏輯分析儀的其中一個 channel 接到 PF12。
同時也要記得將邏輯分析儀的 GND 接到開發板的 GND。
這樣邏輯分析儀才有共同參考電位,量到的 High / Low 才會正確。
使用邏輯分析儀觀察執行時間
搭配 busy_task 測試:
for (;;){ board_debug_pin_set(); for (volatile uint32_t i = 0U; i < 5000000UL; i++) { } board_debug_pin_reset(); osDelay(200U);}在這個例子中,board_debug_pin_set() 會先把 debug GPIO 拉高。
接著程式會進入一個空的 busy loop
等這個迴圈跑完之後,再透過 board_debug_pin_reset() 把 GPIO 拉低。
因此在邏輯分析儀上看到的高電位寬度,就是這個 busy loop 大約花費的時間。
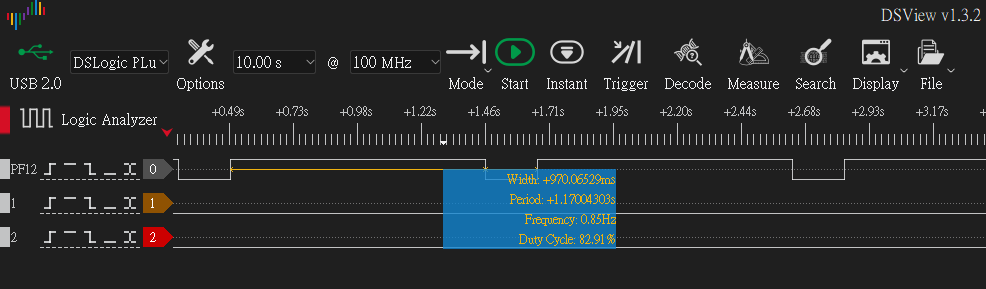
觀察 busy loop 時間
實際觀察可以看到,GPIO 被拉高後,迴圈大約執行了 970 ms。
這個數值不是固定不變的。
它可能會受到以下因素影響:
- 編譯最佳化設定
- 是否開啟 UART log
- 目前系統中其他 task 的執行情況
- interrupt 發生的頻率
- RTOS scheduler 切換時機
所以這裡量到的 970 ms,比較適合當成目前程式狀態下的觀察結果,而不是絕對不變的執行時間。
觀察 osDelay 時間
當 GPIO 被拉低之後,程式會進入osDelay(200U),
因此低電位維持的時間,大約就是當初設定的 200 ms。
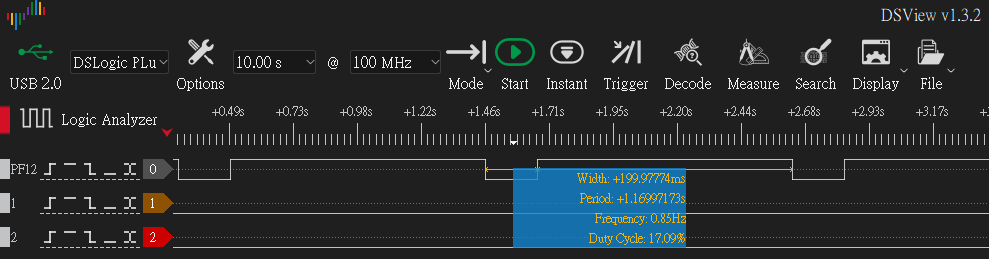
這也剛好可以驗證:
高電位代表 busy loop 執行時間。
低電位代表 task delay 的時間。
透過這種方式,我們可以很直覺地看到 task 在什麼時候忙碌、什麼時候進入 delay。
適合使用的情境
不過這裡先不把它拿來精準分析 task priority。
因為 task priority 對執行結果的影響,還會牽涉到很多因素,例如:
- RTOS tick
- task 是否進入 blocking 狀態
- queue 是否有資料
- semaphore / mutex 是否被卡住
- interrupt 是否頻繁發生
- scheduler 實際切換時機
之後在開發 driver 或分析程式執行時間時,這種方式會很常用。
例如:
- SPI 傳輸時間
- I2C sensor read 時間
- UART parser 處理時間
- display update 時間
- 某個 task 中重要區段的執行時間
只要把想觀察的程式片段用 debug GPIO 包起來,就可以透過邏輯分析儀看到它大約花了多少時間。
本篇小結
開發板到貨了,也就代表最痛苦無聊的邏輯分析儀也到貨了,
不得不說,在寫這 Part 的 除錯與觀察 是最痛苦的,
有 AI 輔助的情況下,logger_task 其實花一點點時間就完成了,除了整體架構,例如 Log 要放在 Service 之類的設計,又多花了一些時間討論。
但邏輯分析儀量 GPIO 高低電位、再配合 task priority 做實驗,真的花了大概多 4 到 5 倍的時間吧 ==
找不到韌體工作之亡羊補牢專案-Part3